
PX4装机教程(八)常用硬件
文章目录 前言一、超声波传感器二、tfmini激光传感器三、空速计四、UWB五、雷讯can pmu lite电流计六、RTK一、北力 GRTK1.接线移动站接线基站接线 2.飞控设置3.配置GRTK4.测试 二、中海达A161.配置RTK2.接线 七、3D打印机
前言
PX4 1.13.0 PIXHAWK4
一、超声波传感器
超声波传感器类似下图这种  将超声波连接到飞控的IIC口
将超声波连接到飞控的IIC口  将参数SENS_EN_MB12XX,然后重启飞控
将参数SENS_EN_MB12XX,然后重启飞控  在Mavlink控制台输入
在Mavlink控制台输入
mb12xx status
输出如下打印信息说明连接正常 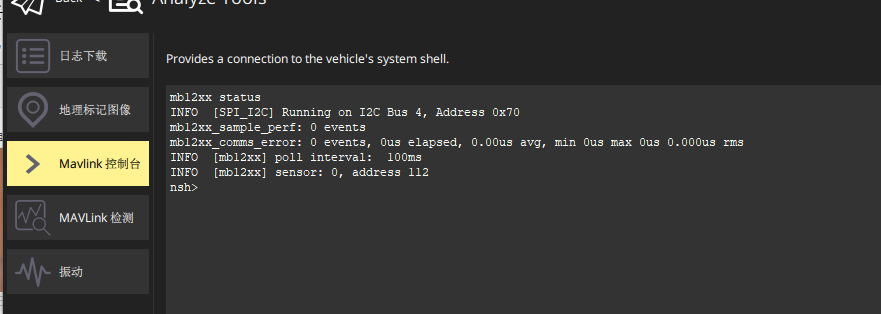 在地面站上添加以下测距传感器的显示
在地面站上添加以下测距传感器的显示 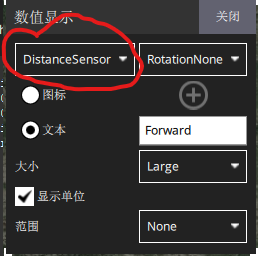 可以在地面站上看到超声波测得的距离
可以在地面站上看到超声波测得的距离 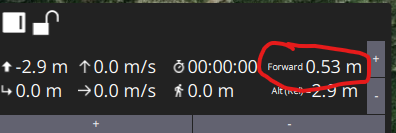
二、tfmini激光传感器
选用的是北醒的tfmini plus  将tfmini plus接到飞控的串口上,我这里接在uart4上
将tfmini plus接到飞控的串口上,我这里接在uart4上 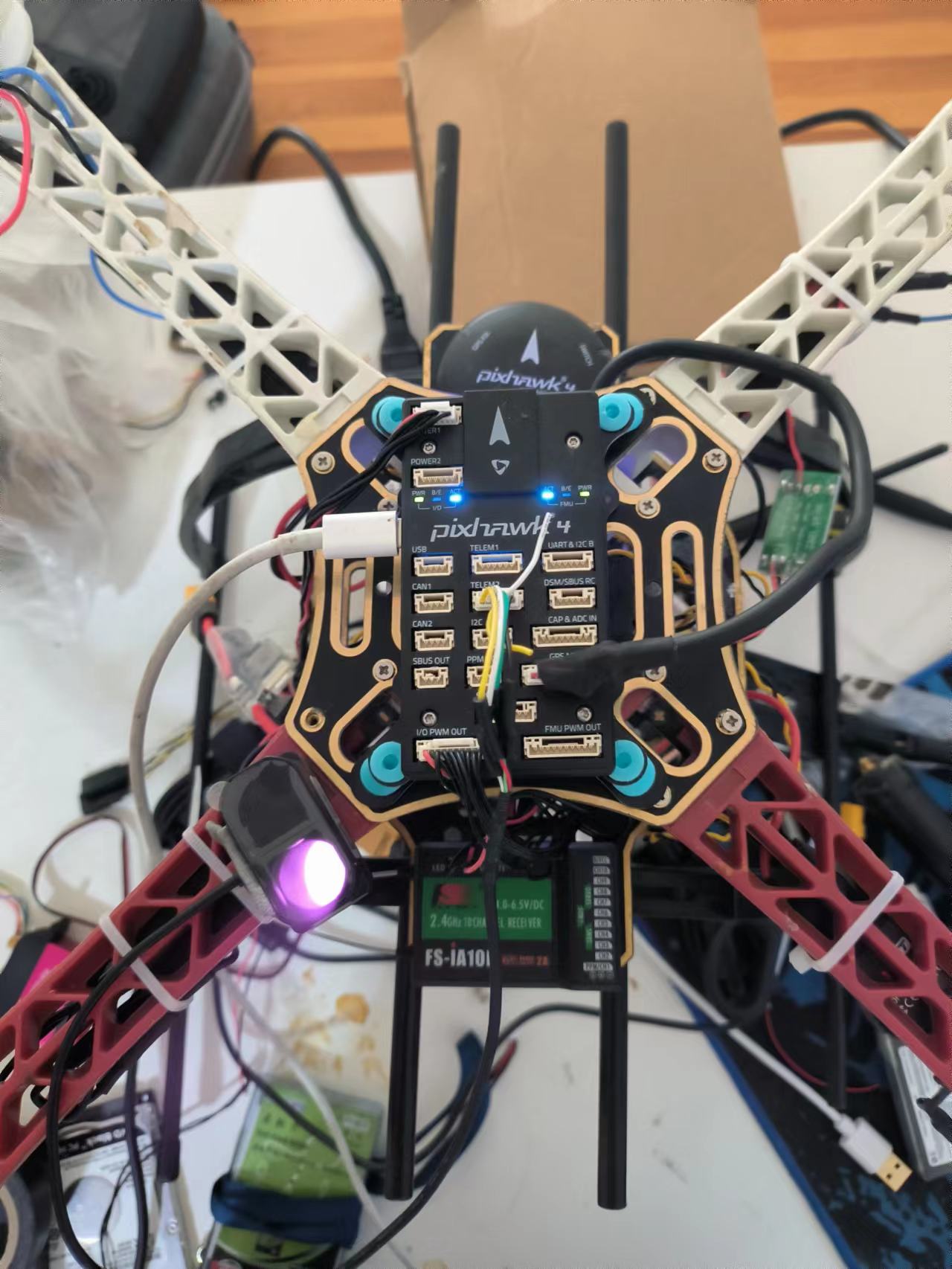
将SENS_TFMINI_CFG设置为自己连接的串口  将SER_TEL2_BAUD改成传感器的波特率(默认是115200) 修改完参数重启飞控。 然后在QGC上添加测距传感器显示,注意角度为向下(上一节超声波为向前),如下图
将SER_TEL2_BAUD改成传感器的波特率(默认是115200) 修改完参数重启飞控。 然后在QGC上添加测距传感器显示,注意角度为向下(上一节超声波为向前),如下图 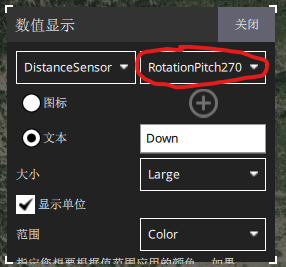 然后就可以看到测距值:
然后就可以看到测距值: 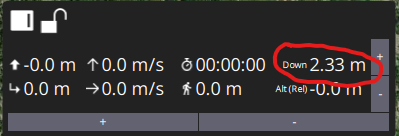
三、空速计
首先设置参数使能空速计,PX4常用的几种空速计的对应参数如下,将对应的参数改成ENABLE即可 Sensirion SDP3X (SENS_EN_SDP3X) TE MS4525 (SENS_EN_MS4525DO) TE MS5525 (SENS_EN_MS5525DS) Eagle Tree airspeed sensor (SENS_EN_ETSASPD) 我这里使用的是MS4525DO传感器,所以将SENS_EN_MS4525DO设置成ENABLE 
如果是使用的是雷讯的MS5525空速计,将SENS_EN_MS5525DS设置成ENABLE 
然后将空速计通过IIC接口与飞控连接,将飞控连接至地面站,正常的话可以看到空速数据 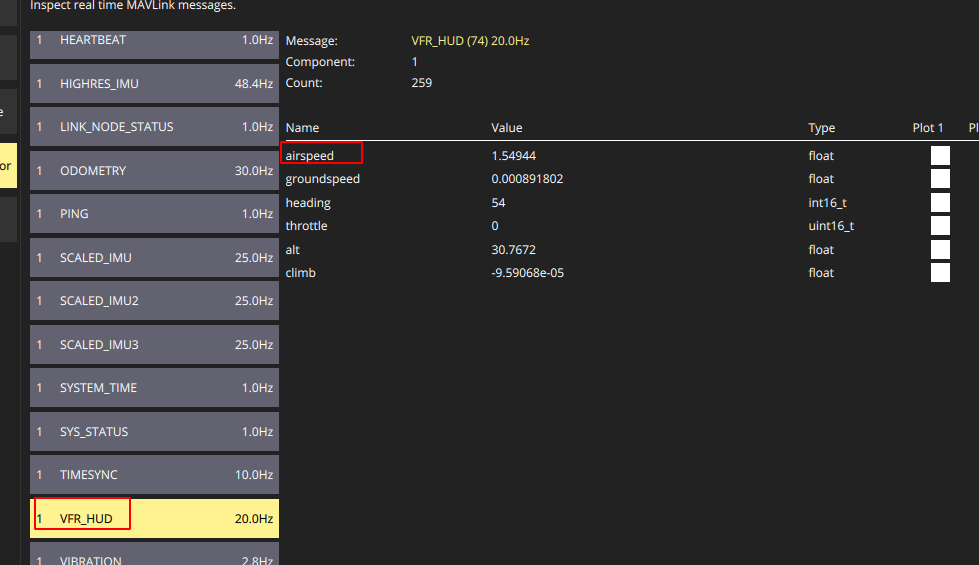
校准空速计 先挡住空速计的管子,确保没有风经过,但不要堵住空速管的任何一个孔
然后在地面站点击校准空速计,出现下面的提示后,向空速管动压头子吹气 
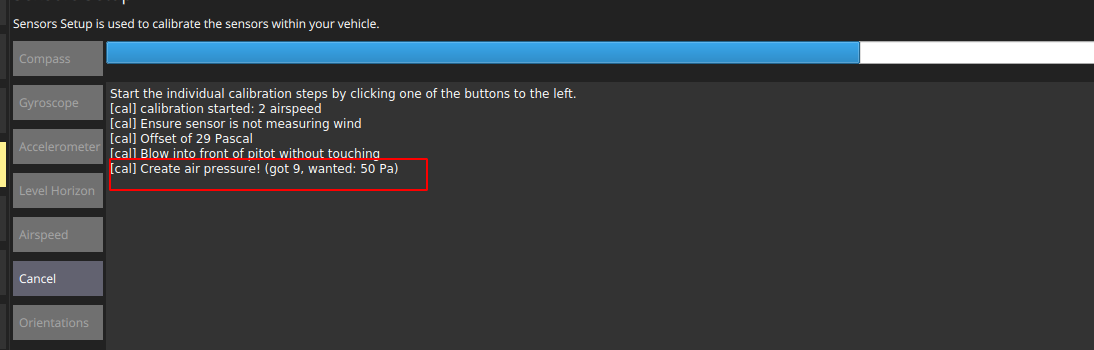 出现下面的提示说明校准成功
出现下面的提示说明校准成功 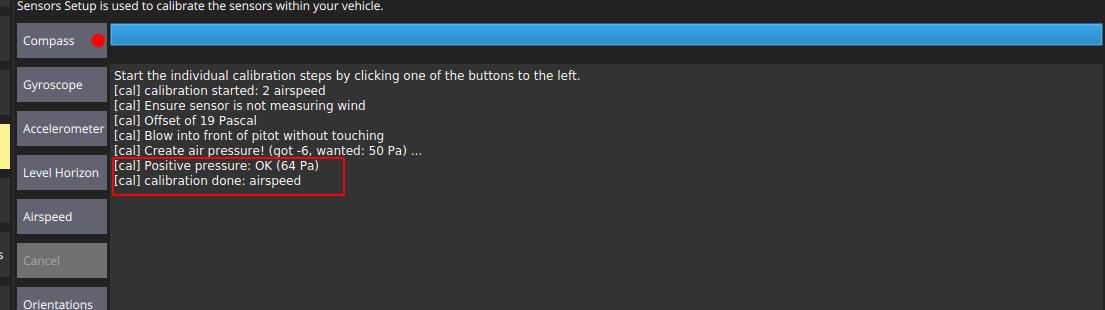 注意空速动态和静态端口是否安装正确。如果接反,向管中吹气时,传感器将读取较大的负压差,校准就会报错,正确的接法是空速管长的那个头子接传感器上面那个口,短的接下面那个口。
注意空速动态和静态端口是否安装正确。如果接反,向管中吹气时,传感器将读取较大的负压差,校准就会报错,正确的接法是空速管长的那个头子接传感器上面那个口,短的接下面那个口。 
四、UWB
采用的uwb模块为空循环公司的LinkTrack AOA跟随系统:  资料链接: https://www.nooploop.com/download/
资料链接: https://www.nooploop.com/download/ 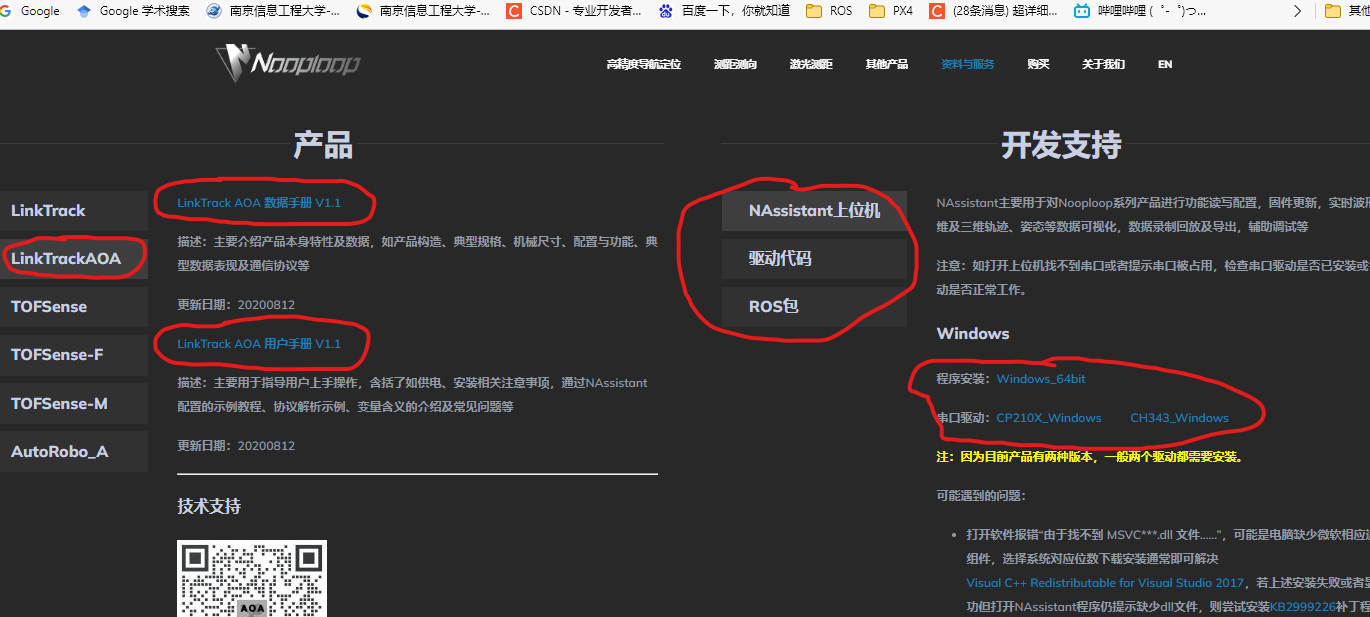 安装NAssistant上位机,我这里下载Windos_64bit,下载后双击安装,除此以外还需要安装下面两个USB转串口的驱动,双击安装即可。
安装NAssistant上位机,我这里下载Windos_64bit,下载后双击安装,除此以外还需要安装下面两个USB转串口的驱动,双击安装即可。
将基站通过USB转TTL接到电脑上 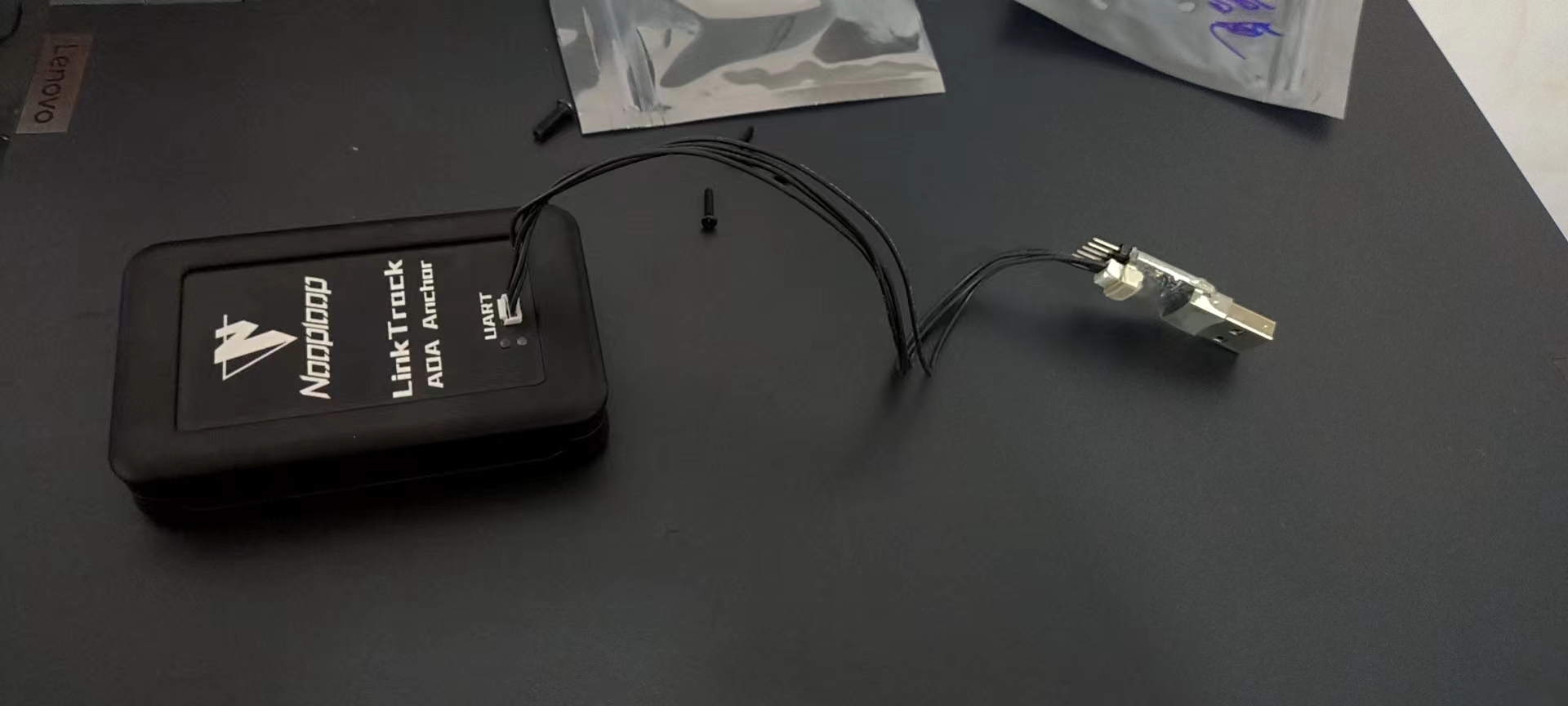 将标签上电(随便在哪上电,可以不用插电脑上)
将标签上电(随便在哪上电,可以不用插电脑上) 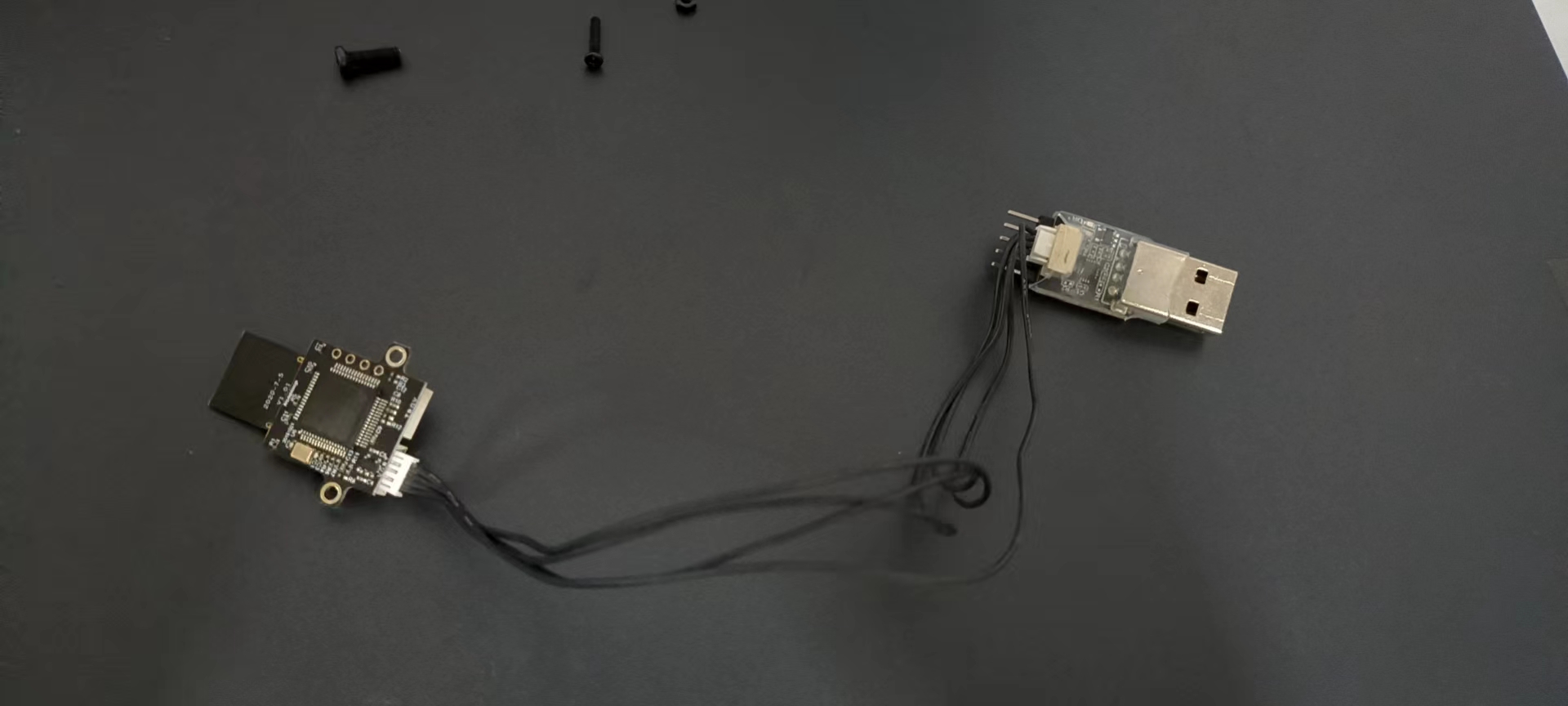 打开NAssistant,设置端口为基站的端口,波特率为921600,然后点击右侧的插头图标连接(默认会自动连接),连接成功后,选中左侧dis和angle复选框,正常的话会在右侧显示距离和角度信息。
打开NAssistant,设置端口为基站的端口,波特率为921600,然后点击右侧的插头图标连接(默认会自动连接),连接成功后,选中左侧dis和angle复选框,正常的话会在右侧显示距离和角度信息。 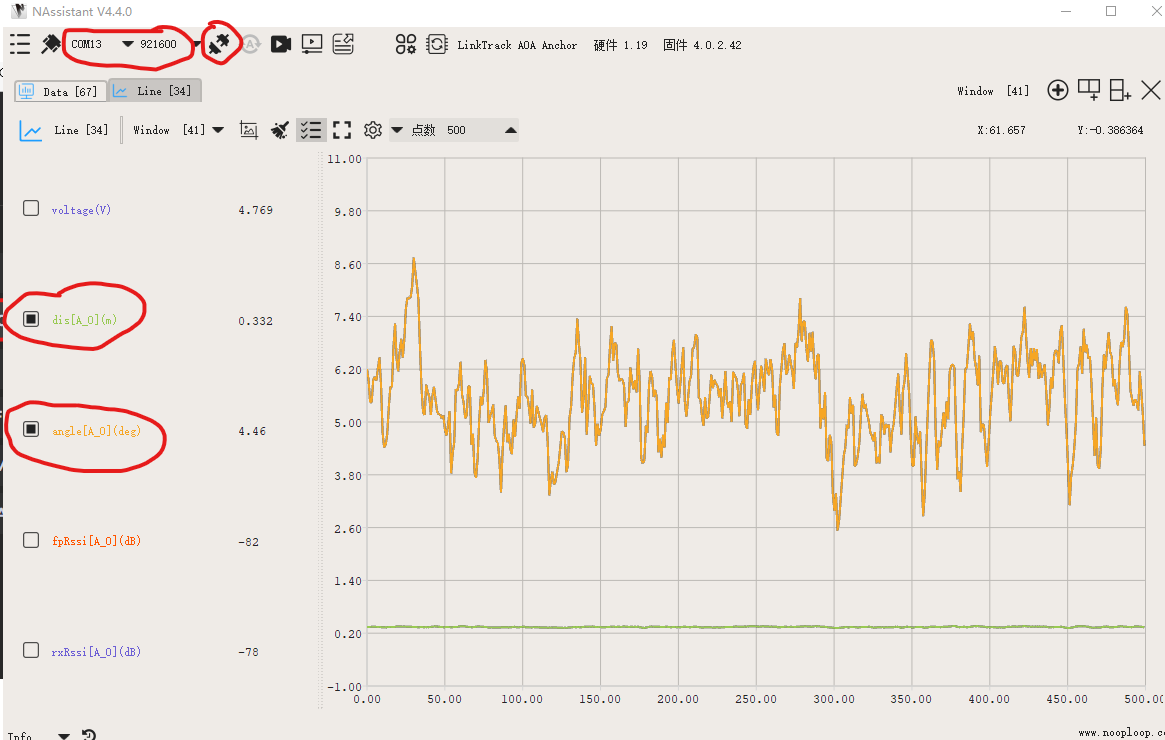
五、雷讯can pmu lite电流计
雷讯X7飞控,原装can pmu lite电流计 将电流计接到powerC接口 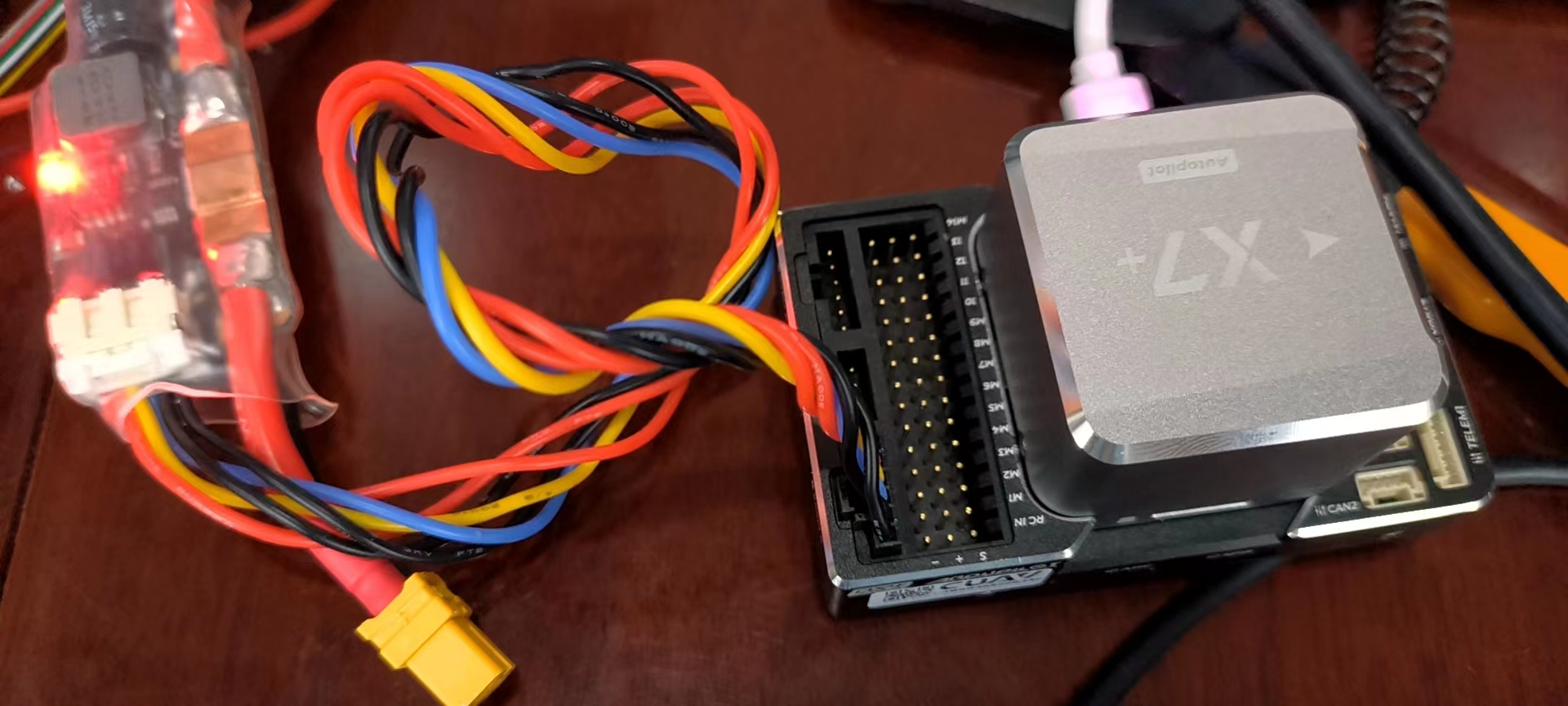 将UAVCAN_ENABLE设置为Sensors Automatic Config
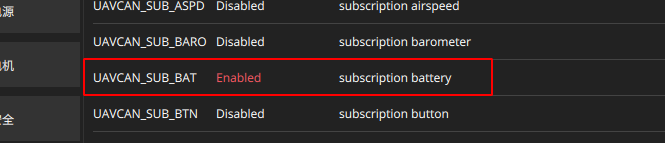
将UAVCAN_ENABLE设置为Sensors Automatic Config 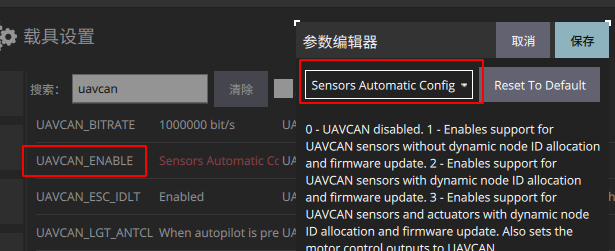 将UAVCAN_SUB_BAT设置为Enabled
将UAVCAN_SUB_BAT设置为Enabled
 重启飞控后即可看到电池状态
重启飞控后即可看到电池状态 
六、RTK 一、北力 GRTK
飞控:PIXHAWK4 本文使用的北力RTK是国产板卡,因此需要修改一下GPS驱动才能使用,如果使用的是标准的GPS板卡(如ublox的F9P),可以直接使用即可。 北力 GRTK使用手册 https://wiki.blicube.com/grtk/GRTK%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8C/
1.接线
GRTK端口定义如下: 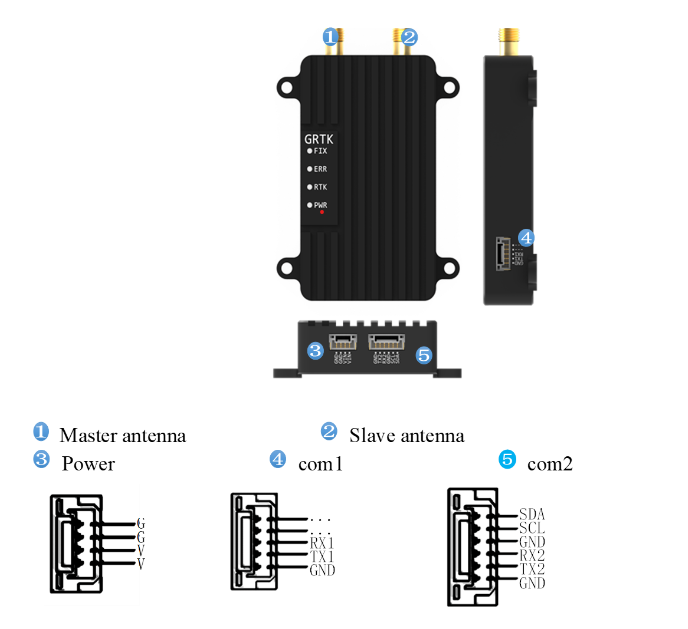
移动站接线
RTK通过串口与飞控通信,可以随便找一个板载的串口都可以,我这里使用的是TELEM2口。将飞控的TX接RTK的RX2,飞控的RX接RTK的TX2,然后共地即可,如下图。  RTK直接用锂电池供电即可,如下图。
RTK直接用锂电池供电即可,如下图。 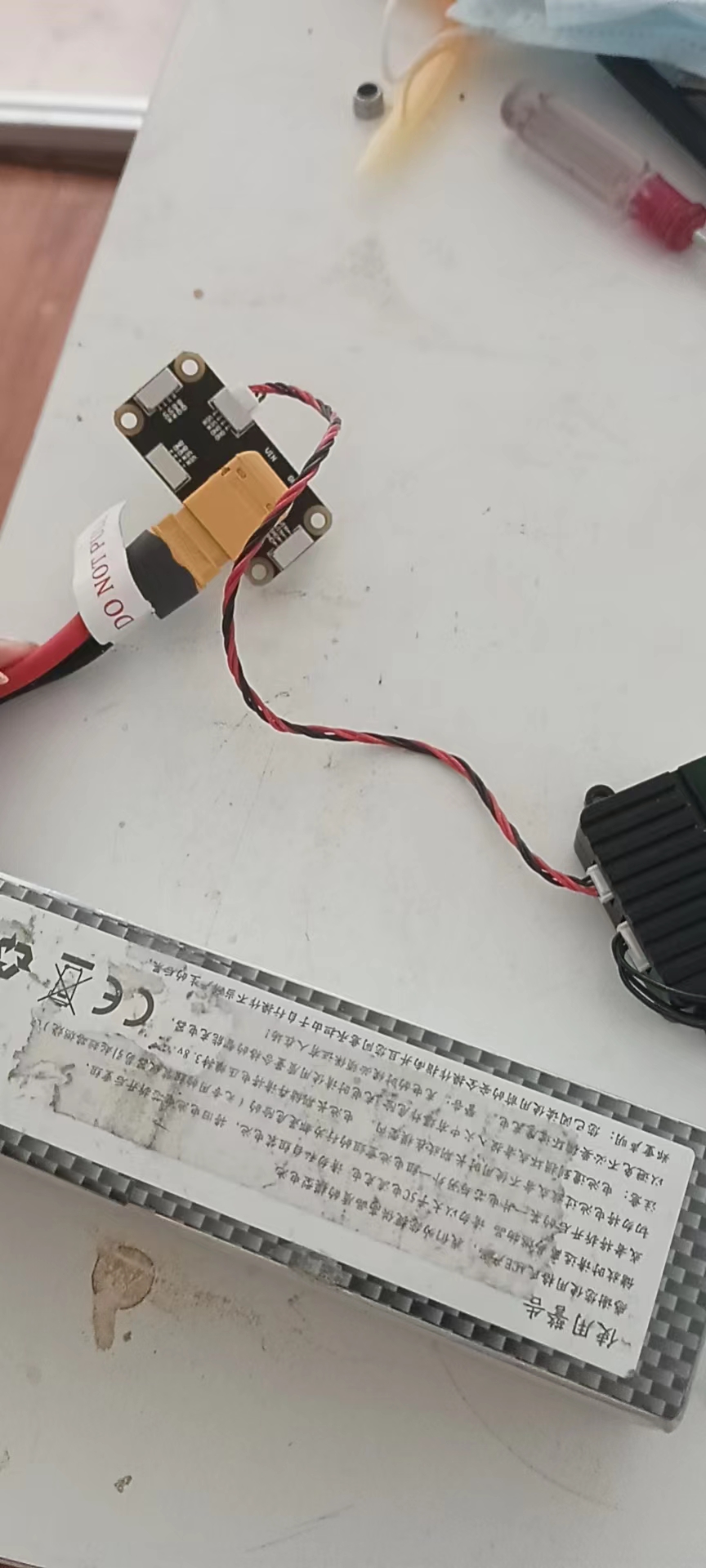 移动站的com1口用于接收基站差分数据,我这里用的是Mirohard P900数传,波特率设置成115200,移动站的tx接电台的rx,移动站的rx接电台的tx,再共地即可。
移动站的com1口用于接收基站差分数据,我这里用的是Mirohard P900数传,波特率设置成115200,移动站的tx接电台的rx,移动站的rx接电台的tx,再共地即可。 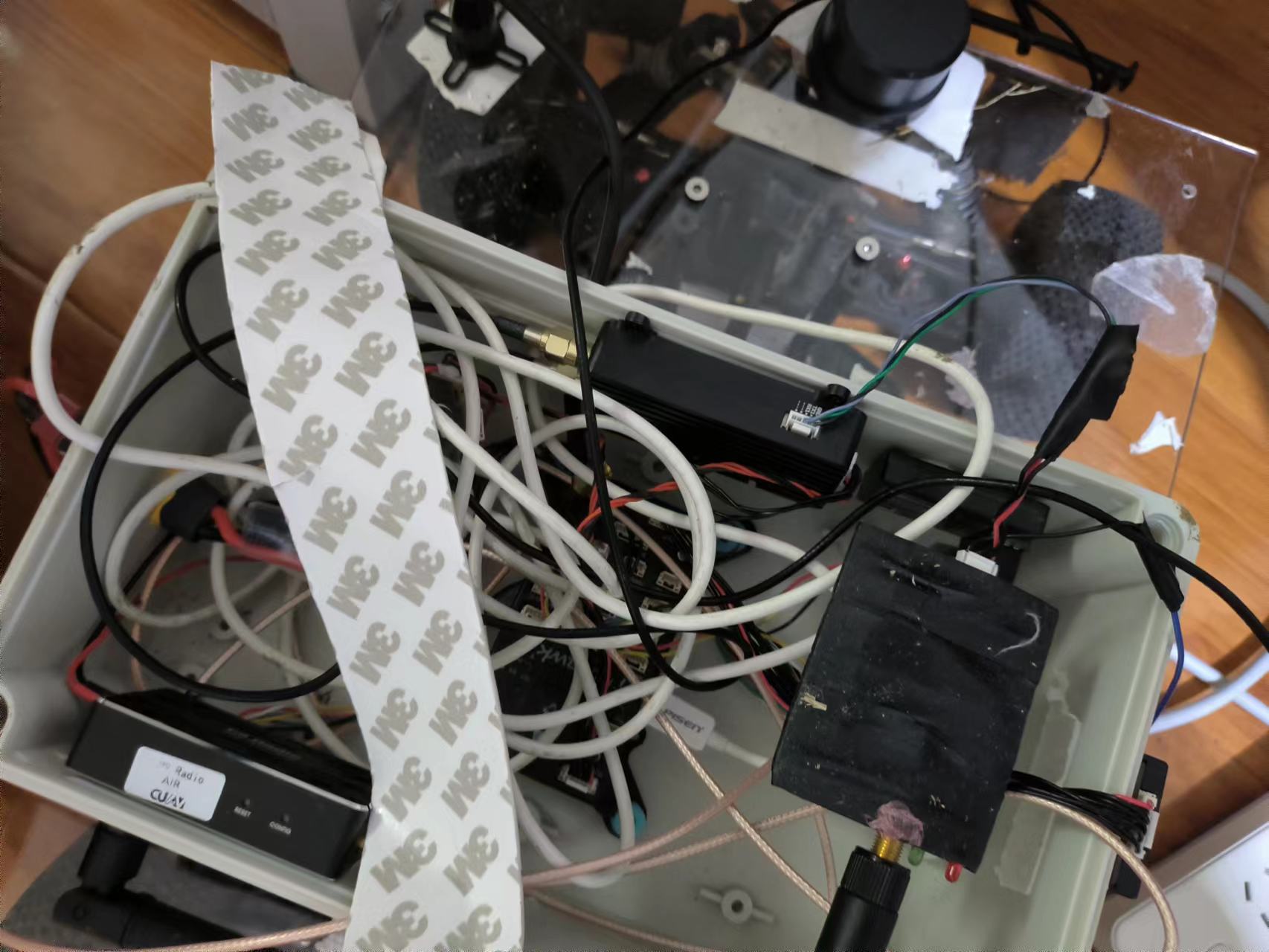
基站接线
将基站的com1的tx接电台的rx,rx接电台的tx,然后共地即可。 
2.飞控设置
我这里设置的是TELEM2 将GPS_1_CONFIG设置为TELEM2,将GPS_1_PROTOCOL设置为NMEA
将SER_TEL2_BAUD设置为RTK的波特率设置(RTK默认是115200)  双天线RTK航向精度较高,可以启动GPS航向,修改EKF2_AID_MASK如下
双天线RTK航向精度较高,可以启动GPS航向,修改EKF2_AID_MASK如下 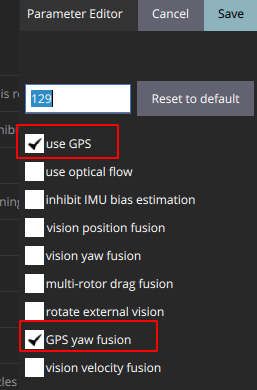 可以采用GPS高度,修改EKF2_HGT_MODE为GPS,如下
可以采用GPS高度,修改EKF2_HGT_MODE为GPS,如下  RTK的精度较高,将GPS位置和速度的观测噪声改小,使得融合时更依赖RTK,修改EKF2_GPS_P_NOISE和EKF2_GPS_V_NOISE如下:
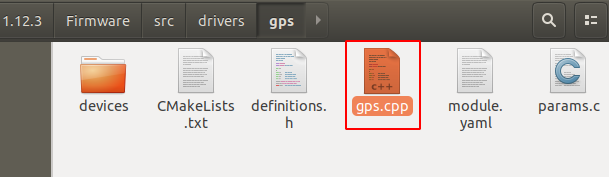
RTK的精度较高,将GPS位置和速度的观测噪声改小,使得融合时更依赖RTK,修改EKF2_GPS_P_NOISE和EKF2_GPS_V_NOISE如下: 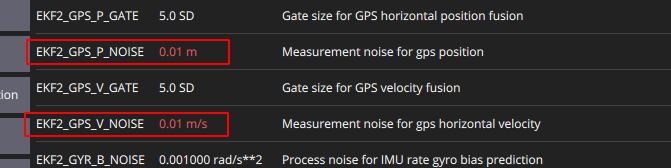 修改下图文件
修改下图文件
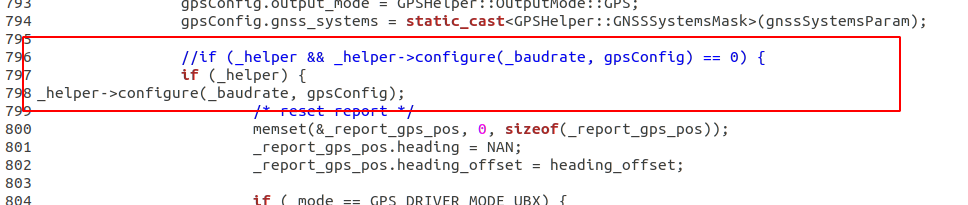
 修改如下 将
修改如下 将
if (_helper && _helper->configure(_baudrate, gpsConfig) == 0) {
改成
if (_helper) {_helper->configure(_baudrate, gpsConfig);
 将下图的
将下图的
unsigned receive_timeout = TIMEOUT_5HZ;
改成
unsigned receive_timeout = TIMEOUT_1HZ;
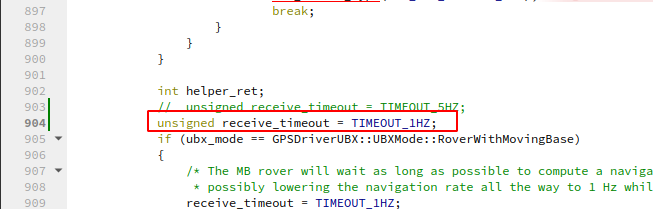 如果不改成1HZ的话可能会有很多丢包。
如果不改成1HZ的话可能会有很多丢包。
3.配置GRTK
可以用串口进行对RTK输出的语句和频率进行配置。 将GRTK的COM2口通过USB转TTL模块连接到电脑的串口助手(我这里使用的是cutecom),波特率设置成模块的波特率(默认115200),连接上之后串口助手上会显示接收到的语句(ASCII码格式)。 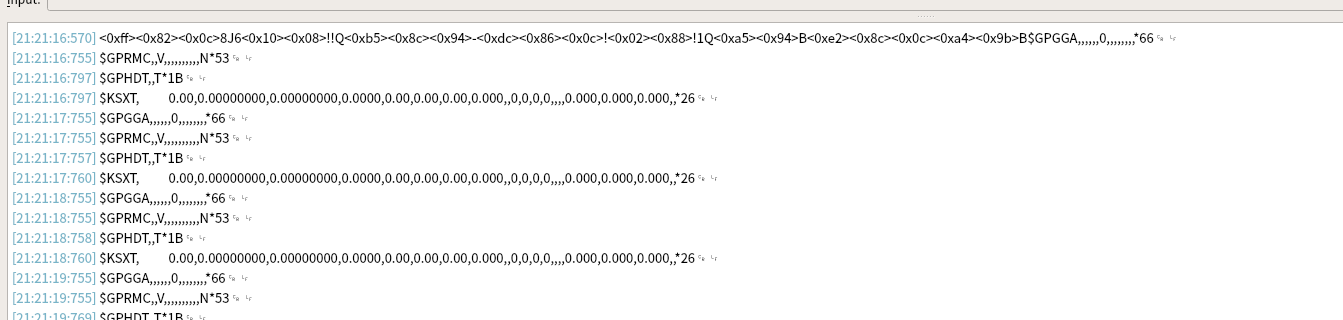 然后向模块发送配置指令(ASCII码格式)
然后向模块发送配置指令(ASCII码格式)
GPGSV COM2 0.2
注意每条命令以CR/LF结尾  发送结果如下:
发送结果如下:  发送完后模块就会输出GSV语句,如下:
发送完后模块就会输出GSV语句,如下: 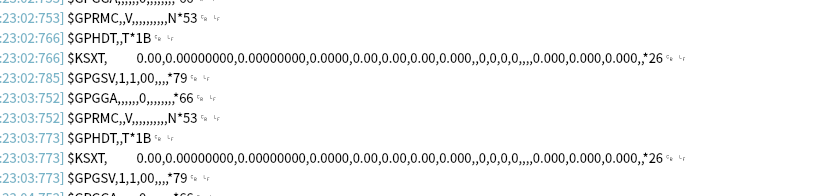 同理,发送
同理,发送
GPGST COM2 0.2
并以CR/LF结尾,发送成功后模块会输出GST语句。 最后输入下面命令保存,命令以CR/LF结尾
SAVECONFIG
配置完成后就会输出相应的语句了。
4.测试
如果移动站想用双天线航向,需要主天线在后从天线在前,主是ant1,否则航向会相差180度,两个天线尽量支高,间距不要太近。 将移动站和基站都上电,等待一段时间后,移动站会进入差分模式,如下:  打开地面站,可以看到是RTK模式
打开地面站,可以看到是RTK模式 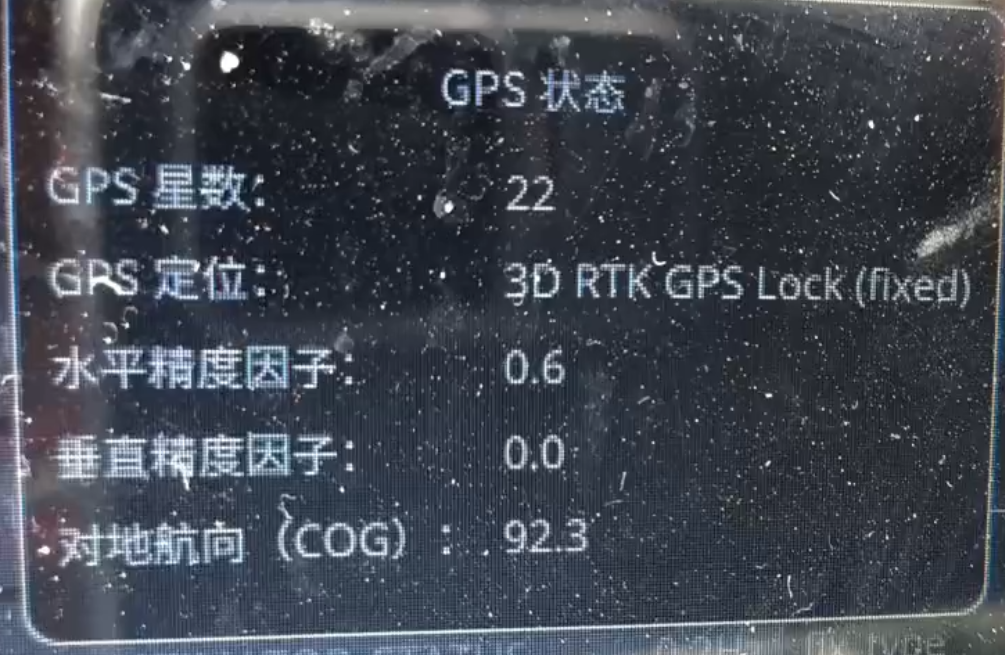
二、中海达A16
中海达A16RTK的使用方法和GRTK类似,PX4的修改和参数配置相同
1.配置RTK
中海达RTK的配置软件 https://download.csdn.net/download/qq_38768959/86587597 安装软件后,打开长按电源开关打开RTK 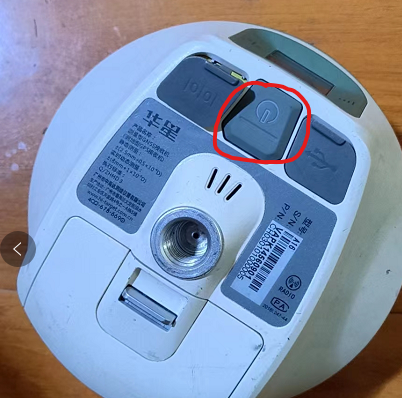 然后手机连接RTK蓝牙
然后手机连接RTK蓝牙
 打开配置软件,点击下面的“请连接设备”
打开配置软件,点击下面的“请连接设备” 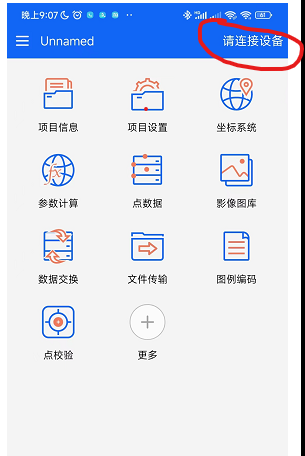 点击下面的“连接”
点击下面的“连接” 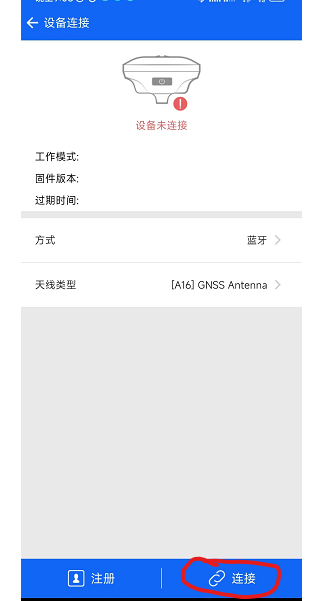 点击RTK的蓝牙并连接
点击RTK的蓝牙并连接 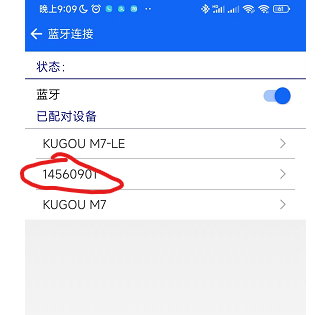 出现下面的页面表示已经连接上,点击左上角返回
出现下面的页面表示已经连接上,点击左上角返回  点击下方的“设备”,然后点击“辅助功能”
点击下方的“设备”,然后点击“辅助功能” 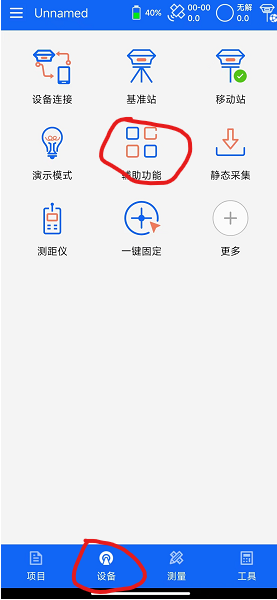 点击“小五芯连接外接设备”
点击“小五芯连接外接设备”  设置波特率、输出语句和频率,最后点击“设置”
设置波特率、输出语句和频率,最后点击“设置” 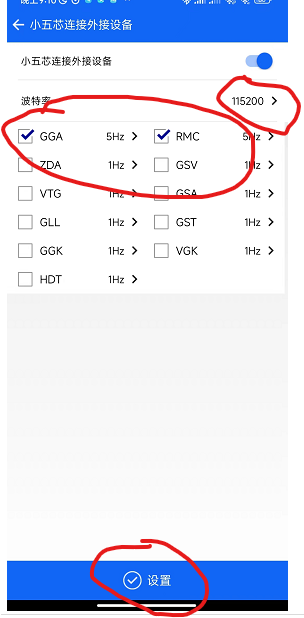
2.接线
将RTK的5芯输出口通过232转TTL接到飞控上即可 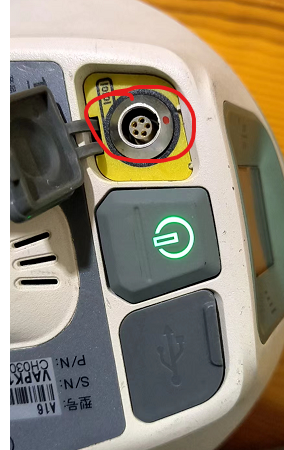
七、3D打印机
闪铸梦想家3D打印机 这里假设已经设计好了stl格式的3D打印文件(一般的3维结构设计软件都可以导出该格式) stl格式的文件还不能直接用来打印,需要用切片软件导出gx格式。
安装切片软件
https://www.sz3dp.com/download-center 我这里下载windos 64位版 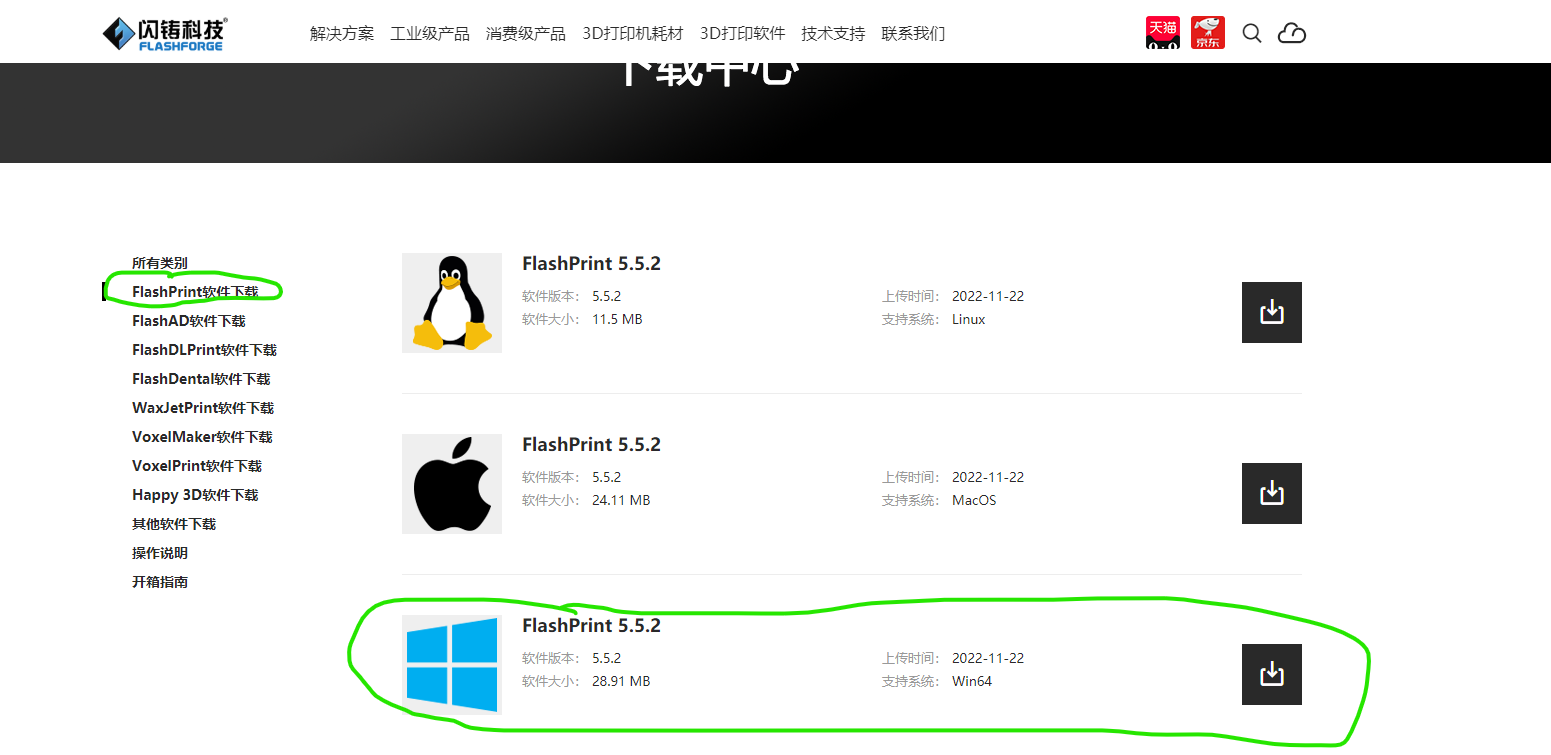
下载压缩包后解压,然后双击exe一直下一步安装,安装完打开 机器类型选Dreamer 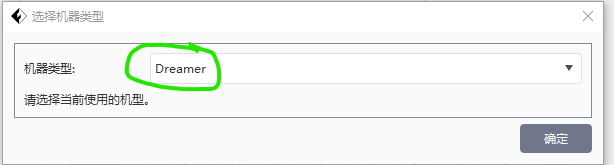 电机文件->载入文件
电机文件->载入文件 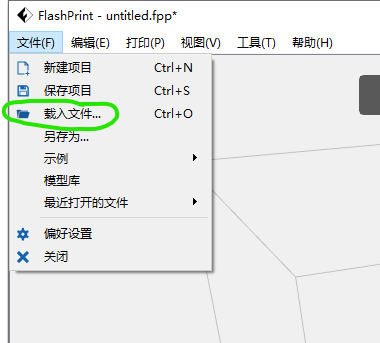 选择stl文件
选择stl文件 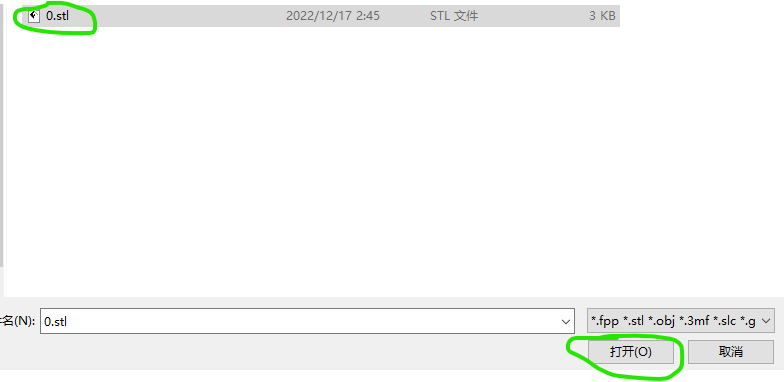 点击开始切片
点击开始切片 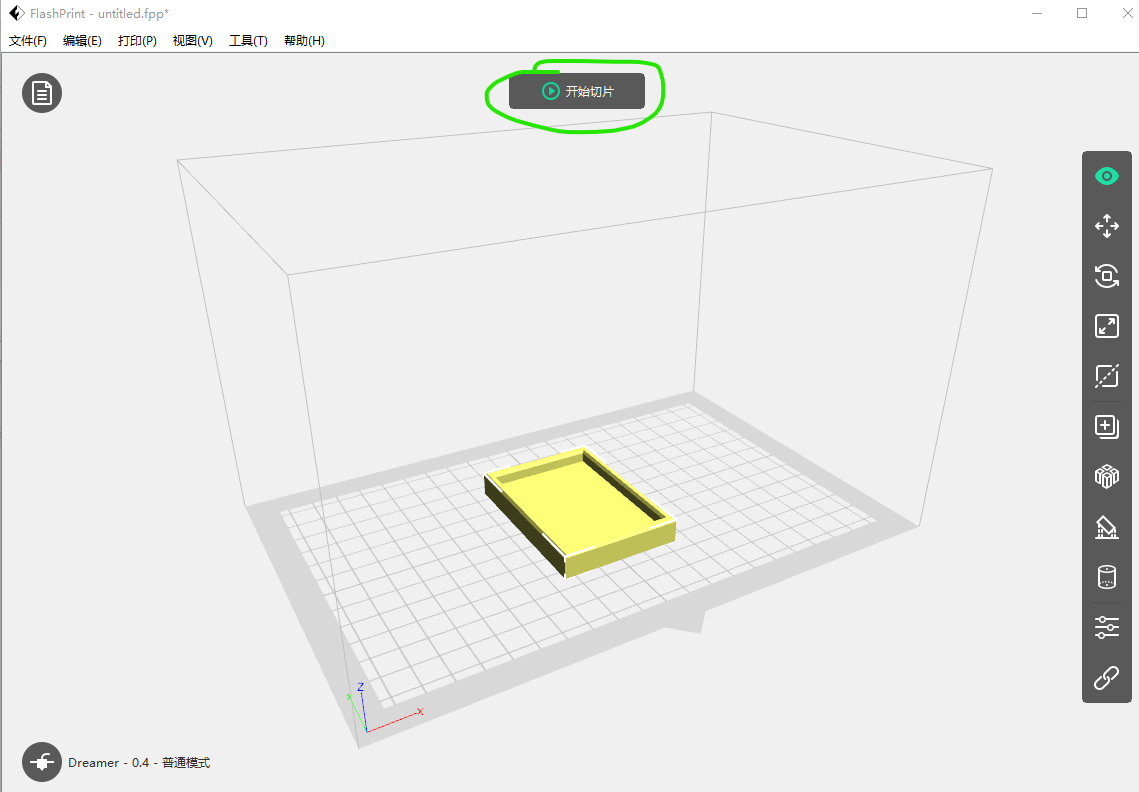
设置打印材料 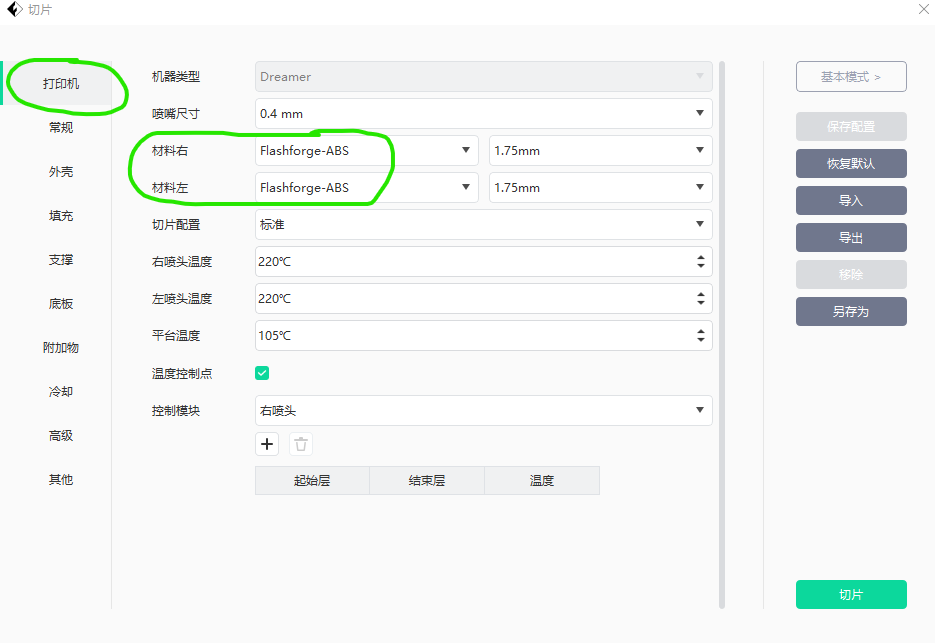
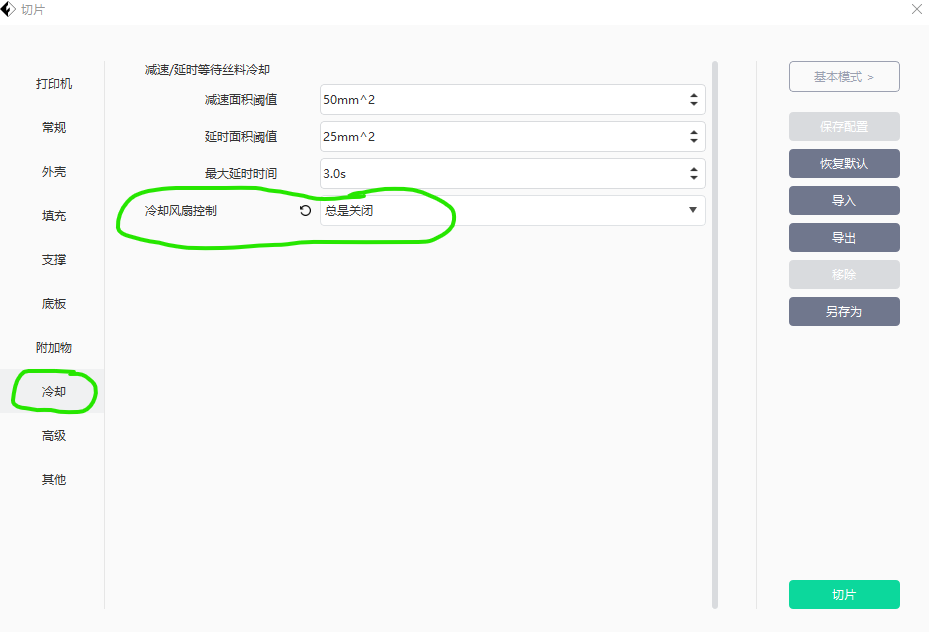
如果出现打印的时候材料与平台粘的不牢,可以设置风扇为总是关闭
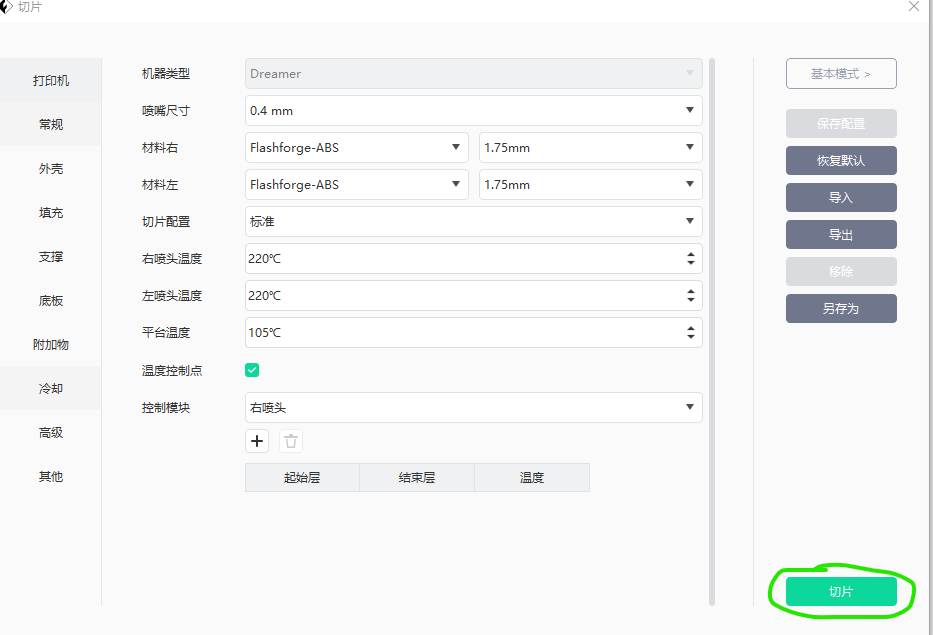
设置完毕后点击切片
切片完成后点击下载 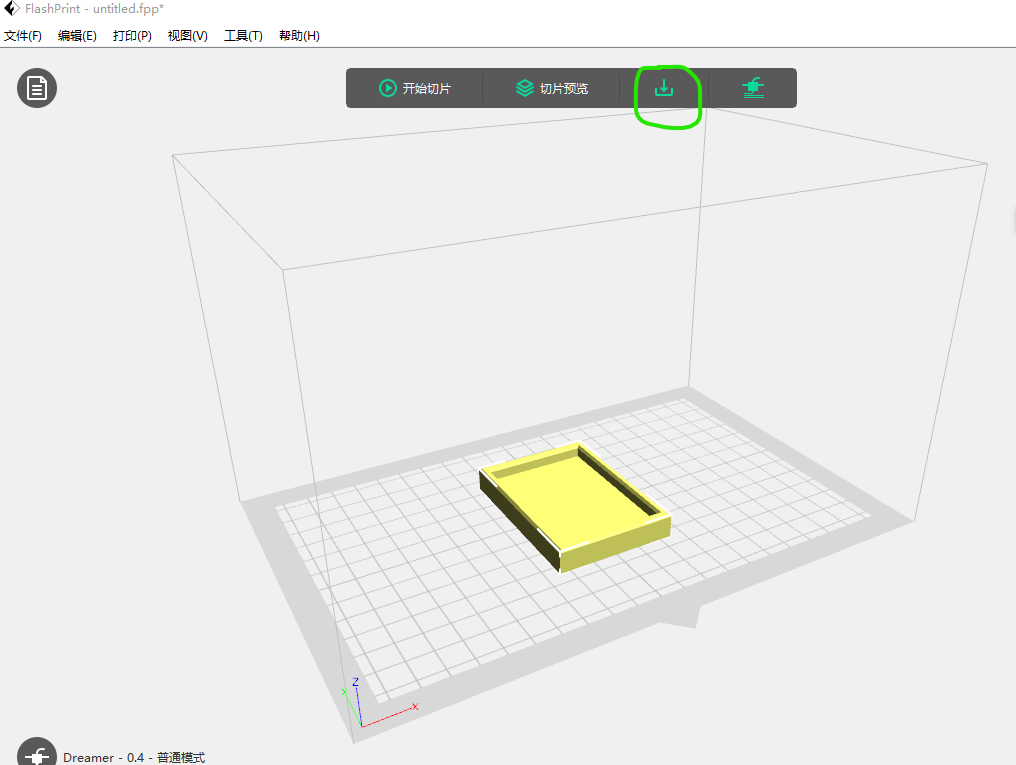 保存为gx格式,就可以复制到SD卡中进行打印了
保存为gx格式,就可以复制到SD卡中进行打印了  打印完成后如果打印件与平台粘的太牢拿不下来,可以将平台加热到50度,然后用美工刀在边角处铲出一条缝,再用铲刀铲
打印完成后如果打印件与平台粘的太牢拿不下来,可以将平台加热到50度,然后用美工刀在边角处铲出一条缝,再用铲刀铲
注意在调平平台的时候,不要把喷头调的太低,否则可能导致打印完后与平台粘的太牢取不下来













